由直角三角形中的已知元素,求出其余未知元素的过程,叫做解直角三角形。直角三角形中,除直角外,共有五个元素,即三条边和两个锐角。换一种说法,就是直角三角形除直角外其它五个变量,知道其中一些变量求其它变量的值。那么知道五个元素(变量)中的几个,就可以求其余元素(变量)呢?下图直角三角形:
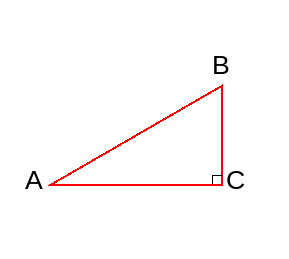
已知直角三角形两边,通过勾股定理
AC²+BC²=AB²
可以求第三边,有通过三角函数的逆函数(反三角函数)
arcsin(BC/AB)=∠A,
或arccos(AC/AB)=∠A
及锐角和是直角
∠A+∠B=90°
可以求出直角三角形的两个锐角。从而得到第一个可解的直角三角形
(1)已知二边;
另外,已知一边和一个锐角,通过三角函数
sin∠A=BC/AB,
cos∠A=AC/AB
可以求出未知的边,通过两锐角和是直角
∠A+∠B=90°
得到另外一个角,从而得到第二个可解的直角三角形
(2)已知一边和一锐角。
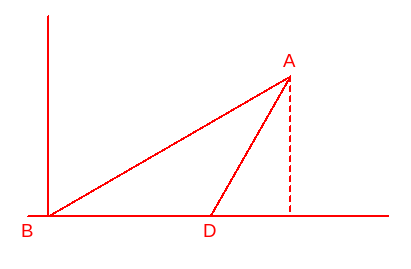
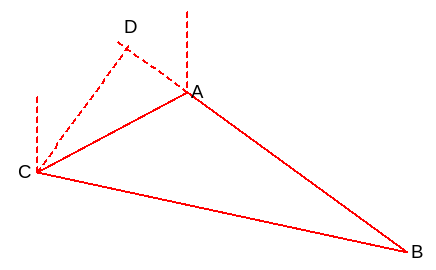
例题1:如下图(作图代码附录1),已知直角三角形ABC中,AC=BC=sqrt(3),AD与BC相交与D点,DC=1,求∠BAD大小和sin∠BAD的实数值。

解:由于AC=BC,所以三角形ABC是等腰直角三角形,所以
∠BAC=45°.
又由于AC=sqrt(3),DC=1,则
tan∠DAC=DC/AC=1/sqrt(3)
得
∠DAC=arctan(1/sqrt(3))=30°
所以
∠BAD=∠BAC-∠DAC=45°-30°=15°.
作三角形ABD底边AB上的高DE(增加的代码附录2)

由三角形EBD也是等腰直角三角形
DE = BD / sqrt(2) =[sqrt(3)-1] / sqrt(2)
AD² = (sqrt(3))²+1²
AD =2
sin∠BAD=DE/AD=[sqrt(3)-1] / 2sqrt(2)=[sqrt(6)-sqrt(2)] / 4
例题1是求sin15°实数值的经典方法。
解直角三角形在间接测量距离和方向(或角度)有广泛的应用。
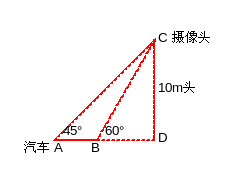
例题2:如下图(作图代码附录3),摄像头离地10米高,一辆车正对着摄像头开过来,第一次摄像时车对于摄像头的仰角是45°,4分之1秒后,第二次摄像时仰角是60°,问车的速度多少千米/小时(实数)?
解:
AB=AD-BD,
AB=CDcot45°-CDcot60°,
AB=10[1-1/sqrt(3)]
汽车速度
V=AB/(1/4)×60×60/1000
V=10[1-1/sqrt(3)]×4×60×60/1000
V=48[3-sqrt(3)] (千米/小时)
答:车的速度48[3-sqrt(3)]千米/小时。
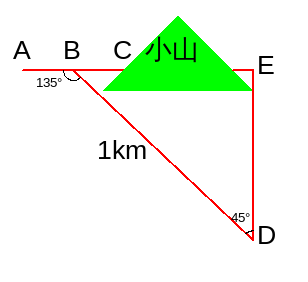
例题3:如下图(作图代码附录4),沿AC方向开山修路,为了加快施工进度,要在小山的另一边同时施工。从AC上的一点B取∠ABD=135°,BD=1km,∠D=45°.那么另一边开挖点E离D多远正好使A,C,E三点在一直线上(用实数表示结果)。
解:
∵ ∠CBD=180°-∠ABD=180°-135°=45°,
∵ ∠EDB=45°,
∴ △BED是等腰直角三角形。
∴ DE=BDsin45°=1/sqrt(2)=sqrt(2)/2(km)
答:另一边开挖点E离D是sqrt(2)/2 km。
例题4:如下图(作图代码附录5),已知灯塔B在灯塔A正西5 n mile处,一轮船保持速度和方向不变在灯塔的南面航行,在某个时间测得距离灯塔A sqrt(113) n mile、距离灯塔B 2sqrt(17) n mile。10分钟后(未过AB线)再测量,距离灯塔A 3sqrt(17) n mile、距离灯塔B sqrt(58) n mile。求轮船的速度和方向。
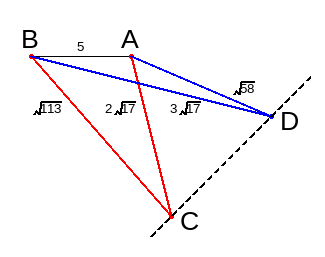
分析:要知道轮船的速度和方向,就要知道C、D点的坐标,△ABC和△ABD的三条边都确定了,这两个三角形都可以解的,但我们现在只会解直角三角形,因此把它们分为二个直角三角形,通过方程组来解。
解:以A灯塔为原点,西向东为x轴正向,南向北为y轴正向作平面直角坐标系(在代码最后顶格输入:build(t)重新运行),如下
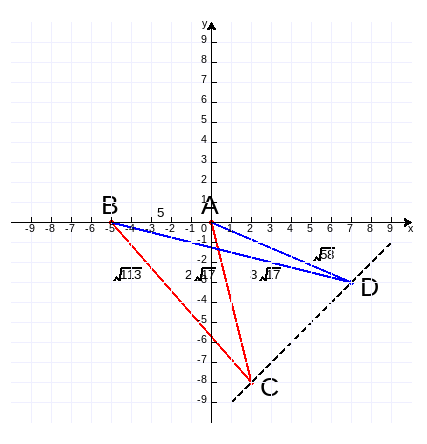
设C点坐标(x1,y1),D点坐标(x2,y2),则
(x1+5)²+y1²=113, ①
x1²+y1²=68, ②
(x2+5)²+y2²=153, ③
x2²+y2²=58。 ④
①-②,得
5(2x1+5)=45,
x1=2,
y1=-8,(因为在第4象限)
③-④,得
5(2x2+5)=95,
x2=7,
y2=-3。(因为在第4象限)
令CD东偏北β,则
tanβ=(y2-y1)/(x2-x1)=5/5=1,
β=arctan1=45°,
CD=sqrt(5²+5²)=5sqrt(2)。
速度
V=5sqrt(2)/10×60=30sqrt(2) (n mile)。
答:轮船向东偏北45°,以30sqrt(2) n mile的速度航行。
上例中,使用了过二点直线的倾角计算方法
tan倾角=(y2-y1)/(x2-x1)
实际上是一次项的系数,假如,过C、D点的直线是
y=tan倾角 x + b,
y1=x1tan倾角+b,
b=y1-x1tan倾角,
b=-8-2,
b=-10。
即
y=x-10。
先计算倾角,再计算常数项是二点定直线的经典方法。
例题5:如下图(作图代码附录6),敌方导弹在20000米高空中以4马赫(4倍音速4×340m/s)来袭击,当它在离拦截点水平距离是40000米时发射导弹拦截,拦截导弹的速度为3马赫,求拦截导弹的仰角(保留小数点后2位)。
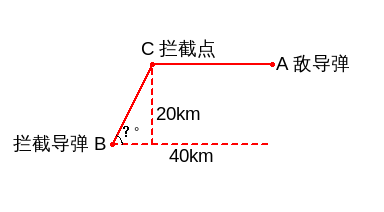
解:时间相同,速度与路程成正比,得
AC:4=BC:3。
设B到C的水平距离是x,得
(40-x):4=sqrt(x²+20²):3,
3(40-x)=4sqrt(x²+20²),
两边平方
9*1600-720x+9x²=16x²+16*400,
7x²+720x-5*1600=0,
取正根
x=[-720+sqrt(720²+4*7*5*1600)]/(2*7),
x=[80sqrt(29)-360]/7。
得
tan∠B=20/x=7/[4sqrt(29)-18],
tan∠B=7×[2sqrt(29)+9]/2/(4×29-81),
tan∠B=[2sqrt(29)+9]/10。
得,仰角
∠B=arctan[2sqrt(29)+9]/10,
∠B≈63.16°.
答:拦截导弹的仰角约是63.16°.
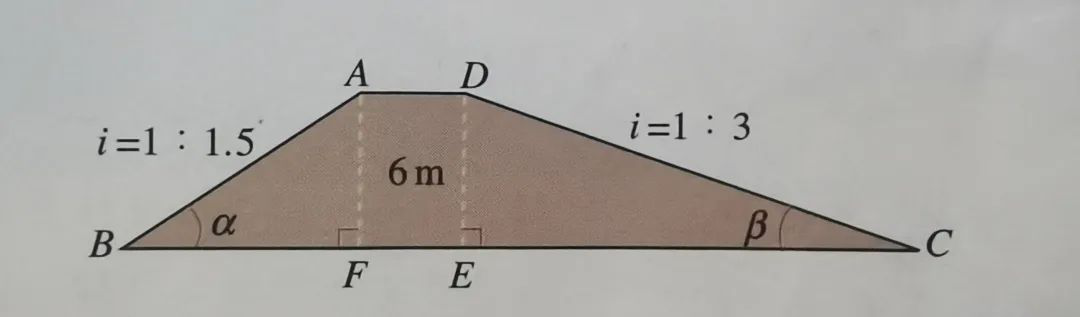
例题6:如下图,拦水坝的横断面为梯形ABCD,AF=DE=6m.斜面坡度i=1:1.5是指坡面的铅直高度AF与水平宽度BF的比,斜面坡度i=1:3是指DE与CE的比.根据图中数据,求:
(1)坡角α和β的度数;
(2)斜坡AB的长(结果保留小数点后一位).
解:(1)
tanα=1/1.5,
α=arctan1/1.5,
α=33.7°.
tanβ=1/3,
β=arctan1/3,
β=18.4°.
(2)
AB=sqrt[6²+(1.5×6)²]
AB=10.8(m).
例题7:如下图,海中有一个小岛A,它周围8 n mile内有暗礁.渔船跟踪鱼群由西向东航行,在B点测得小岛A在北偏东60°方向上,航行12 n mile到达D点,这时测得小岛A在北偏东30°方向上.如果渔船不改变航线继续向东航行,有没有触礁的危险?

解:作A到BD的距离,如下图(作图代码附录7)
设A到BD的距离是h,则
hcot(90-60)-hcot(90-30)=12,
h=12/(cot30-cot60),
h≈10.4 (n mile),
h>8.
答:如果渔船不改变航线继续向东航行,没有触礁的危险.
例题8:多年来,很多船只、飞机都在大西洋的个区域内神秘失踪,这个区域称为百慕大三角.直至现在,人们仍未能破解这个秘密.根据下图中标出的百慕大三角的位置,计算百慕大三角的面积(结果取整数).

解:延迟2720km的线,与1700km为斜边构成一个直角三角形,如下图(作图代码附录8).
由题义可知
∠CAD=180°-(62°+54°)=64°.
△ABC面积=(1/2)AB×ACsin∠CAD=(1/2)×2720×1700sin64°
△ABC面积≈2078012km².
即百慕大三角的面积约是2078012km².
利用解直角三角形的知识解决实际问题的一般过程是:
(1)将实际问题抽象为数学问题(画出平面图形,转化为解直角三角形的问题);
(2)根据问题中的条件,适当选用锐角三角函数等解直角三角形;
(3)得到数学问题的答案;
(4)得到实际问题的答案.
练习1:根据锐角三角函数的性质,设计一个计算方法,算出sin22.5°的准确实数值.
练习2:海中有一小岛P,在以P为圆心、半径为16√2 n mile的圆形海域内有暗礁.轮船自西向东航行,它在A处时测得小岛P位于北偏东60°方向上,且A,P之间的距离为32 n mile.若轮船继续向正东方向航行,轮船有无触礁危险?请通过计算加以说明.如果有危险,轮船自A处开始沿南偏东多少度的方向航行,能安全通过这一海域?
练习3:一轮船在海中航行,它前进方向的左侧有南北排列的A,B(在A的正北方)两个航标,相距1 n mile.某个时间测量,A在轮船的北偏西60°,B在轮船的北偏西30°,2分钟后再测量,A在轮船的南偏西30°,B在轮船的南偏西45°.求轮船的速度(n mile/小时)和方向(保留小数点后2位).
练习4:求直线y=2x-5、y=3x+6、y=-x+7所围成的三角形面积。
练习5:海盗正往东北方向以每小时30 n mile逃窜,海警开始追铺时,海盗在海警的北偏西60°,距离5 n mile,海警船的速度是50 n mile,问海警船的方向是多少时最佳(保留小数点后2位)?
附录1:
import turtle as t
t.setup(500,500)
t.screensize(400,400)
t.up()
t.pensize(2)
t.pencolor("red")
#
t.setpos(-50, -50)
t.seth(30)
t.down()
t.fd(200)
posD=t.pos()
t.seth(-90)
t.fd(100)
posC=t.pos()
t.seth(180)
t.fd(10)
pos=t.pos()
t.pensize(1)
t.pencolor("black")
t.seth(90)
t.fd(10)
t.seth(0)
t.fd(10)
t.up()
t.setpos(pos)
t.pensize(2)
t.pencolor("red")
t.down()
t.setpos(-50,-50)
t.up()
t.pencolor("black")
t.setpos(-55,-60)
t.write("A",align="right",font=("Arial", 20, "normal"))
t.setpos(posD[0]+5,posD[1]-10)
t.write("D",font=("Arial", 20, "normal"))
t.setpos(posC[0]+5,posC[1]-10)
t.write("C",font=("Arial", 20, "normal"))
t.setpos(-50,-50)
t.seth(45)
t.pencolor("red")
t.down()
t.fd(100*6**0.5)
posB=t.pos()
t.setpos(posD)
t.up()
t.setpos(posB[0]+5,posB[1]-10)
t.pencolor("black")
t.write("B",font=("Arial", 20, "normal"))
t.ht()
附录2:
t.pencolor("red")
t.setpos(posD)
t.seth(135)
h=(3**0.5-1)/2**0.5*100
for i in range(0, int(h), 5):
t.down()
t.fd(2.5)
t.up()
t.fd(2.5)
t.setpos(posD)
t.fd(h)
posE=t.pos()
t.bk(10)
t.pensize(1)
t.pencolor("black")
t.seth(45)
t.down()
t.fd(10)
t.seth(135)
t.fd(10)
t.up()
t.setpos(posE[0]-5,posE[1]+5)
t.write("E",align="center", font=("Arial", 20, "normal"))
附录3:
import turtle as t
t.setup(500,500)
t.screensize(400,400)
t.up()
t.pensize(2)
t.pencolor("red")
#
t.setpos(-50, -50)
t.seth(45)
for i in range(0, int(100*2**0.5), 5):
t.down()
t.fd(2.5)
t.up()
t.fd(2.5)
t.setpos(50, 50)
t.dot(3)
t.seth(-90)
for i in range(0, 100, 5):
t.down()
t.fd(2.5)
t.up()
t.fd(2.5)
t.setpos(50, -50)
t.seth(180)
L2=100/3**0.5
for i in range(0, int(L2), 5):
t.down()
t.fd(2.5)
t.up()
t.fd(2.5)
t.setx(50-L2)
posL2=t.pos()
t.seth(60)
for i in range(0, int(2*L2), 5):
t.down()
t.fd(2.5)
t.up()
t.fd(2.5)
t.setpos(posL2)
t.down()
t.setx(-50)
t.up()
t.pencolor("black")
t.setpos(-40, -48)
t.write("45°",font=("Arial", 10, "normal"))
t.setpos(posL2[0]+10, -48)
t.write("60°",font=("Arial", 10, "normal"))
t.setpos(posL2[0], -65)
t.write("B",align="center", font=("Arial", 10, "normal"))
t.setpos(-40, -65)
t.write("汽车 A",align="right", font=("Arial", 10, "normal"))
t.setpos(55, 45)
t.write("C 摄像头",font=("Arial", 10, "normal"))
t.sety(-5)
t.write("10m头",font=("Arial", 10, "normal"))
t.sety(-55)
t.write("D",font=("Arial", 10, "normal"))
t.ht()
附录3:
import turtle as t
t.setup(500,500)
t.screensize(400,400)
t.up()
t.pensize(2)
t.pencolor("red")
#
t.setpos(-100, 100)
t.down()
t.seth(0)
t.fd(100)
t.up()
posC=t.pos()
t.seth(-135)
t.pencolor("green")
t.fillcolor("green")
t.begin_fill()
t.fd(30)
t.seth(0)
DL=30*3**0.5+100
t.fd(DL)
t.seth(135)
t.fd(30)
posE2=t.pos()
t.fd(DL/2*2**0.5-30)
t.setpos(posC)
t.end_fill()
t.up()
t.setpos(posE2)
t.down()
t.pencolor("red")
t.seth(0)
t.fd(20)
posE=t.pos()
t.seth(-90)
t.fd(170)
posD=t.pos()
t.setpos(-50, 100)
t.up()
t.pensize(1)
t.pencolor("black")
t.setpos(-60, 100)
t.down()
t.seth(-90)
t.circle(10,135)
t.up()
t.setpos(-60, 80)
t.write("135°",align="right",font=("Arial", 10, "normal"))
t.setpos(posD[0], posD[1]+10)
t.down()
t.seth(180)
t.circle(10,45)
t.up()
t.setpos(posD[0]-2, posD[1]+15)
t.write("45°",align="right",font=("Arial", 10, "normal"))
t.pencolor("black")
t.setpos(-100, 105)
t.write("A",align="center", font=("Arial", 20, "normal"))
t.setx(-50)
t.write("B",align="center", font=("Arial", 20, "normal"))
t.setx(0)
t.write("C",align="center", font=("Arial", 20, "normal"))
t.setx(50)
t.write("小山",align="center",font=("Arial", 20, "normal"))
t.setpos(posE[0]+5, 90)
t.write("E",font=("Arial", 20, "normal"))
t.sety(posD[1]-10)
t.write("D",font=("Arial", 20, "normal"))
t.setpos(25, (100+posD[1])/2-10)
t.write("1km",align="right",font=("Arial", 20, "normal"))
t.ht()
附录4:
import turtle as t
t.setup(500,500)
t.screensize(400,400)
t.up()
t.pensize(2)
t.pencolor("red")
#
t.setpos(-100, 100)
t.down()
t.seth(0)
t.fd(100)
t.up()
posC=t.pos()
t.seth(-135)
t.pencolor("green")
t.fillcolor("green")
t.begin_fill()
t.fd(30)
t.seth(0)
DL=30*3**0.5+100
t.fd(DL)
t.seth(135)
t.fd(30)
posE2=t.pos()
t.fd(DL/2*2**0.5-30)
t.setpos(posC)
t.end_fill()
t.up()
t.setpos(posE2)
t.down()
t.pencolor("red")
t.seth(0)
t.fd(20)
posE=t.pos()
t.seth(-90)
t.fd(170)
posD=t.pos()
t.setpos(-50, 100)
t.up()
t.pensize(1)
t.pencolor("black")
t.setpos(-60, 100)
t.down()
t.seth(-90)
t.circle(10,135)
t.up()
t.setpos(-60, 80)
t.write("135°",align="right",font=("Arial", 10, "normal"))
t.setpos(posD[0], posD[1]+10)
t.down()
t.seth(180)
t.circle(10,45)
t.up()
t.setpos(posD[0]-2, posD[1]+15)
t.write("45°",align="right",font=("Arial", 10, "normal"))
t.pencolor("black")
t.setpos(-100, 105)
t.write("A",align="center", font=("Arial", 20, "normal"))
t.setx(-50)
t.write("B",align="center", font=("Arial", 20, "normal"))
t.setx(0)
t.write("C",align="center", font=("Arial", 20, "normal"))
t.setx(50)
t.write("小山",align="center",font=("Arial", 20, "normal"))
t.setpos(posE[0]+5, 90)
t.write("E",font=("Arial", 20, "normal"))
t.sety(posD[1]-10)
t.write("D",font=("Arial", 20, "normal"))
t.setpos(25, (100+posD[1])/2-10)
t.write("1km",align="right",font=("Arial", 20, "normal"))
t.ht()
附录5:
import sys
sys.path.append("/5xstar/pyfiles")
from mymath.rcs import *
import turtle as t
from fractions import Fraction
from math import *
import turtle as t
t.setup(500,500)
t.screensize(400,400)
t.up()
build(t,draw=False) #,draw=False
#B
circularDot(t, -5, 0, "red", size=5)
line(t,-5,0,0,0)
circularDot(t, 0, 0, "red", size=5)
t.pensize(2)
t.pencolor("red")
line(t,-5,0,2,-8)
line(t,0,0,2,-8)
circularDot(t, 2, -8, "red", size=5)
t.pencolor("blue")
line(t,-5,0,7,-3)
line(t,0,0,7,-3)
circularDot(t, 7, -3, "blue", size=5)
t.pencolor("black")
t.setpos(20,-9*20)
t.seth(45)
for i in range(0,int(160*2**0.5), 10):
t.down()
t.fd(5)
t.up()
t.fd(5)
t.setpos(-5*20, 2)
t.write("B",align="center",font=("Arial", 20, "normal"))
t.setx(-2.5*20)
t.write("a",align="center",font=("Arial", 10, "normal"))
t.setx(0)
t.write("A",align="center",font=("Arial", 20, "normal"))
t.setpos(2*20+10,-8*20-20)
t.write("C",font=("Arial", 20, "normal"))
t.setpos(7*20+10,-3*20-20)
t.write("D",font=("Arial", 20, "normal"))
t.setpos(-3*20,-3*20)
t.write("b1",align="right",font=("Arial", 10, "normal"))
t.setx(-2)
t.write("c1",font=("Arial", 10, "normal"))
t.setx(4*20)
t.write("b2",align="right",font=("Arial", 10, "normal"))
t.setpos(5*20,-2*20)
t.write("c2",align="right",font=("Arial", 10, "normal"))
t.ht()
附录6:
import sys
sys.path.append("/5xstar/pyfiles")
from mymath.rcs import *
from mymath.rooting import *
from math import *
import turtle as t
t.setup(500,500)
t.screensize(400,400)
t.up()
build(t,draw=False) #,draw=False
t.pensize(2)
t.pencolor("red")
#
circularDot(t, 4, 2, "red", size=5)
line(t,4,2,-2,2)
circularDot(t, -2, 2, "red", size=5)
line(t,-2,2,-4,-2)
circularDot(t, -4, -2, "red", size=5)
t.setpos(-4*20, -2*20)
t.seth(0)
for i in range(0,8*20, 10):
t.down()
t.fd(5)
t.up()
t.fd(5)
t.setx(-2*20)
t.seth(90)
for i in range(0,4*20, 10):
t.down()
t.fd(5)
t.up()
t.fd(5)
t.pencolor("black")
t.pensize(1)
t.setpos(-4*20+10, -2*20)
t.seth(90)
t.down()
t.circle(10,atan2(2,1)*180/pi)
t.up()
t.setpos(4*20+5, 2*20-10)
t.write("A 敌导弹",font=("Arial", 14, "normal"))
t.setpos(-2*20-10, 2*20+5)
t.write("C 拦截点", font=("Arial", 14, "normal"))
t.setpos(-4*20-5, -2*20-10)
t.write("拦截导弹 B",align="right",font=("Arial", 14, "normal"))
t.setpos(0,-2*20-22)
t.write("40km",align="center",font=("Arial", 14, "normal"))
t.setpos(-2*20+5,0-20)
t.write("20km",font=("Arial", 14, "normal"))
t.setpos(-4*20+10,-2*20+5)
t.write("?°",font=("Arial", 10, "normal"))
t.ht()
附录7:
import turtle as t
t.setup(500,500)
t.screensize(400,400)
t.up()
t.pensize(2)
t.pencolor("red")
#
t.setpos(-180,-100)
t.down()
t.setx(180)
t.up()
t.setx(-160)
t.down()
t.sety(100)
t.up()
t.sety(-100)
t.seth(30)
t.down()
t.fd(280)
posA=t.pos()
t.seth(-120)
t.fd(2*7/3**0.5*20)
posD=t.pos()
t.up()
t.setpos(posA)
t.seth(-90)
for i in range(0,140,10):
t.down()
t.fd(5)
t.up()
t.fd(5)
t.setpos(-180, -125)
t.write("B", align="center", font=("Arial", 14, "normal"))
t.setpos(posD[0],posD[1]-25)
t.write("D", align="center", font=("Arial", 14, "normal"))
t.setpos(posA[0], posA[1]+5)
t.write("A",align="center",font=("Arial", 14, "normal"))
t.ht()
附录8:
from math import *
import turtle as t
t.setup(500,500)
t.screensize(400,400)
t.up()
t.pensize(2)
t.pencolor("red")
#
t.setpos(-100,180)
t.seth(-90)
for i in range(0,80,10):
t.down()
t.fd(5)
t.up()
t.fd(5)
posA=(-100,100)
t.setpos(posA)
t.seth(-36)
for i in range(0,90,10):
t.down()
t.bk(5)
t.up()
t.bk(5)
t.setpos(posA)
t.down()
t.fd(272)
t.up()
posB=t.pos()
t.setpos(posA)
t.seth(-152)
t.down()
t.fd(170)
posC=t.pos()
t.setpos(posB)
t.up()
t.setpos(posC)
t.seth(54)
for i in range(0,int(170*sin(64*pi/180)),10):
t.down()
t.fd(5)
t.up()
t.fd(5)
posD=t.pos()
t.setpos(posC)
t.seth(90)
for i in range(0,80,10):
t.down()
t.fd(5)
t.up()
t.fd(5)
t.pencolor("black")
t.setpos(posA[0]+5, posA[1]-10)
t.write("A", font=("Arial", 14, "normal"))
t.setpos(posB[0]+5,posB[1]-10)
t.write("B", font=("Arial", 14, "normal"))
t.setpos(posC[0]-5, posC[1]-10)
t.write("C",align="right",font=("Arial", 14, "normal"))
t.setpos(posD[0], posD[1]+5)
t.write("D",align="center",font=("Arial", 14, "normal"))
t.ht()